Aravis and GStreamer on Fedora Linux
This is a short and simple guide to getting started with the Aravis gstreamer plugin on Fedora Linux. I'm going to be using a COGNEX CAM-CIC-2000-60-G camera along with a cheap TP-Link 4 port PoE switch to power it and connect it to my PC.
Installation
Aravis is not currently packaged for any linux distro so we have install it's dependencies and build from source. I've written a shell script to automate this and included it below:
#!/bin/bash
# This script will fetch, build and install the latest release of
# https://github.com/AravisProject/aravis on Fedora Linux
set -o errexit
set -o nounset
set -o pipefail
SCRIPTPATH="$( cd -- "$(dirname "$0")" >/dev/null 2>&1 ; pwd -P )"
SRC_DIR="${SCRIPTPATH}/aravis-src"
wrapped-curl() {
curl --silent --show-error --retry 3 "$@"
}
get-src() {
# Download the latest release and extract into $SRC_DIR
local latest_url="https://api.github.com/repos/AravisProject/aravis/releases/latest"
local tarball_url=""
tarball_url=$(wrapped-curl -s "${latest_url}" | jq .tarball_url | tr -d '"')
if [[ -z "${tarball_url}" ]]; then
echo "Could not get tarball_url from api.github.com"
return 1
fi
local tarball="aravis.tar.gz"
if wget "${tarball_url}" --quiet --tries=3 -O "${tarball}"; then
mkdir -p "${SRC_DIR}"
tar --extract --file "${tarball}" -C "${SRC_DIR}" --strip-components=1
else
echo "Failed to download src tarball from ${tarball_url}"
return 1
fi
}
install-deps() {
# Kitchen sink approach but all build-time options will be auto-detected
# and enabled and you'll be able to use the python bindings
set -x
sudo dnf update && sudo dnf install gstreamer1 \
gstreamer1-devel \
gstreamer1-doc \
gstreamer1-libav \
gstreamer1-vaapi \
gstreamer1-plugins-base-tools \
gstreamer1-plugins-base-devel \
gstreamer1-plugins-good \
gstreamer1-plugins-good-extras \
gstreamer1-plugins-ugly \
gstreamer1-plugins-bad-free \
gstreamer1-plugins-bad-free-devel \
gstreamer1-plugins-bad-free-extras \
gobject-introspection \
gobject-introspection-devel \
python3-gobject \
gi-docgen \
ninja-build \
meson \
g++ \
cmake \
glib2-devel \
gtk3-devel \
gtk-doc \
libxslt \
libxml2-devel \
libusb1-devel
set +x
}
build() {
cd "${SRC_DIR}"
meson build
cd build
ninja
set -x
sudo ninja install
set +x
}
clean() {
local build_dir="${SRC_DIR}/build"
if [[ -d "${build_dir}" ]]; then
cd "${build_dir}"
# be quiet about it
set -x
sudo ninja uninstall > /dev/null 2>&1
set +x
fi
# make sure local $src_dir will be in . (current dir)
cd "${SCRIPTPATH}"
if [[ -d "${SRC_DIR}" ]]; then
local src_dir=""
src_dir=$(basename "${SRC_DIR}")
rm -rf "${src_dir}"
fi
if [[ -f "aravis.tar.gz" ]]; then
rm aravis.tar.gz
fi
}
default() {
if get-src && install-deps && build; then
local green="\033[0;32m"
local no_color="\033[0m"
echo
echo -e "${green}Successfully built and installed aravis${no_color}"
echo
echo "To use the gstreamer plugin you'll have to set the ENV vars:"
echo "export GI_TYPELIB_PATH=/usr/local/lib64/girepository-1.0"
echo "export GST_PLUGIN_PATH=/usr/local/lib64/gstreamer-1.0"
echo
fi
}
"${@:-default}"
Save the file as run.sh and run it with ./run.sh. If you want to remove Aravis do ./run.sh clean. Make sure to export the GI_TYPELIB_PATH and GST_PLUGIN_PATH vars and test that the GStreamer plugin was successfully installed by running:
gst-inspect-1.0 aravissrc
Networking
Now we need to do some networking configuration before can use our camera. Connect your camera to one of the switches PoE ports and then connect your the switch to your computer using another one of the switches ports. In my case this looks like:

Next list your network connections:
$ nmcli conn show
NAME UUID TYPE DEVICE
Wired Connection 1 9e4786e0-b2ab-3b1f-aa31-5285d2c2412d ethernet eno1
13_going_on_30 e4955e17-9cb3-41e0-9df5-06c057803c58 wifi wlp0s20f3
My computer is connected to the WIFI network 13_going_on_30 and the switch is connected at Wired Connection 1. Your setup will be different from mine so double check that you apply the following steps to the right connection.
Rename the connection to make life a little easier:
$ nmcli conn modify "Wired connection 1" con-name cam-net
$ nmcli conn show
NAME UUID TYPE DEVICE
cam-net 9e4786e0-b2ab-3b1f-aa31-5285d2c2412d ethernet eno1
13_going_on_30 e4955e17-9cb3-41e0-9df5-06c057803c58 wifi wlp0s20f3
GigE cameras use a Link-local Address (LLA) by default so we need to set the IP on our cam-net to also be on the Link-local network:
nmcli conn modify cam-net ipv4.address 169.254.0.0/16
nmcli conn modify cam-net ipv4.method manual
We can also enable jumbo frames/packets on cam-net to improve performance:
nmcli conn modify cam-net 802-3-ethernet.mtu 9000
The cam-net connection may have timed out waiting to be assigned an IP address from the DHCP server. To bring it back up run:
$ nmcli conn show --active
NAME UUID TYPE DEVICE
13_going_on_30 e4955e17-9cb3-41e0-9df5-06c057803c58 wifi wlp0s20f3
$ nmcli conn up cam-net
$ nmcli conn show --active
NAME UUID TYPE DEVICE
13_going_on_30 e4955e17-9cb3-41e0-9df5-06c057803c58 wifi wlp0s20f3
cam-net 9e4786e0-b2ab-3b1f-aa31-5285d2c2412d ethernet eno1
Using Aravis
We can use the arv-tool-0.8 command to check that our camera is being detected:
$ arv-tool-0.8
COGNEX-CIC-2000-22454601 (169.254.74.116)
If your camera is detected we can now use the GStreamer plugin. Here's an example gst-launch-1.0 script:
:::bash
#!/usr/bin/env bash
framerate=30
exposure=33333 # (1 / framerate) * 100,000
cam_name="${1:-}" # Optional camera-name arg
if [[ -z "${cam_name}" ]]; then
echo "Default to using first detected camera"
cam_name=$(arv-tool-0.8 | awk 'NR==1{print $1}' | tr -d "\n")
fi
gst-launch-1.0 aravissrc camera-name=${cam_name} exposure="${exposure}" gain-auto=2 packet-size=9000 \
! video/x-raw,framerate=${framerate}/1 \
! clockoverlay valignment=top halignment=right \
! textoverlay text="${cam_name}" valignment=top halignment=left \
! videoconvert \
! queue \
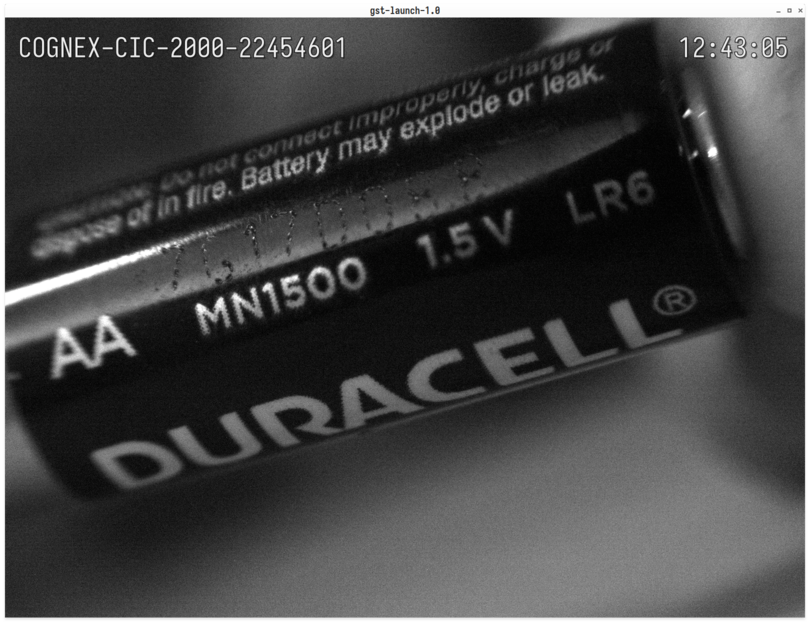
! autovideosink
A couple of screenshots from the above pipeline: